
图解噪声与去噪 之二:从『均值滤波』到『BM3D』
Apr 29, 2016 · 1 minute read · Commentssoftware
本文系微信公众号《大话成像》,知乎专栏《大话成像 all in camera》原创文章,转载请注明出处。
上一篇讲过了temporal noise和Fix patter noise的分离,通过多帧平均可以去除掉temporal noise,并分离出FPN,在这篇将介绍如何去除FPN。
在信号处理教科书中,介绍过很多经典的图像去噪方法,主要的是针对随机噪声的,对于图像中非随机噪声,比如sensor本身的物理缺陷导致的hot pixel,weak pixel 或是dead pixel,一般称之为impulse noise,对于impulse noise有单独的处理方法,因为他们不属于随机噪声。
随机噪声也就是在比图像的真实信号或高或低的不确定变化。
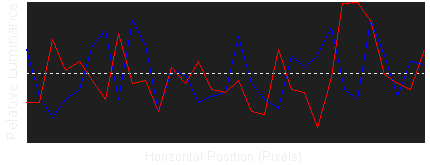
如果中间的虚线视作真实信号,红色和蓝色的曲线代表随机噪声叠加后的信号,如果虚线定义为0,那么所有随机噪声求和应为0 ,在统计学上叫零和噪声。由于零和噪声的这种特点,均值滤波可以降低图像的噪声。
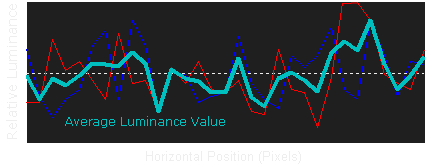
如图所示,浅蓝色的线代表红蓝线求均值以后的信号,波动的幅度明显减小了,也就是噪声降低了。
均值滤波与变换域去噪
教科书里讲图像去噪声,第一个提到的就是均值滤波,在图像处理中,就是当前像素的值用周围n个像素的均值来代替。
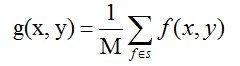
在实际信号处理中,就是用一个n x n 的模版 A 对图像进行卷积,比如:
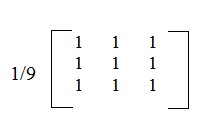
当前像素就是处在矩阵中心的像素,它的值等于周围所有像素的值包括它自身取均值。
这样的一个基本均值滤波,它可以去掉噪声,但同时也会把图像搞模糊,比如当前的像素正好是一个图案的边缘,左边是白色的,像素值是200,右边是黑色的,像素值是10,做完均值滤波,(200+200+200+10+10+10+10+10+10)/9 = 74, 这样图像的细节就被模糊掉了。于是人们就对这种均值滤波进行了一些改进,比如增加图像边缘方向的判断,红线的方向上相邻像素的数值差不多,所以在做均值的时候只把这个方向的两个像素计算在内。这样既去掉了一些噪声,又保持了锐度。
![]()
这样由于做均值的像素变少了,去噪的效果不太好,于是有人想出一种none local mean的方法,也就是做均值的像素不再是领域的像素,扩大些范围找相似的,然后再做均值。
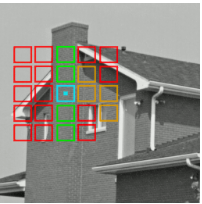
绿色的部分和中心要处理的部分很相似,求均值的时候就把这些部分算进去,而红色的部分不相似,去均值的时候就排除这些部分。很容易想象,搜索的范围越大,计算量越大。
这些方法都是从空间的角度去思考如何去噪,也就是所谓的spatial noise reduction,这条路子能想的方法也都做得差不多了,于是有人换个角度想问题,就有了变换域做去噪的方法。通过数学变换,在变换域上把信号和噪声分离,然后把噪声过滤掉,剩下的就是信号。如下图,
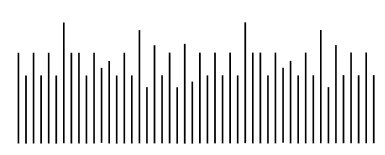
没有噪声的信号看起来比较光滑:

带噪声的信号就会有些毛刺:
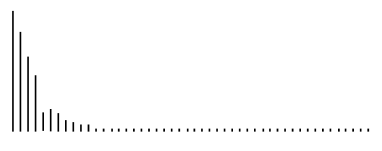
把带噪声的信号变换到一个域(比如频域,小波域等等)
高于一个阈值的部分就是噪声,设一个截止值,把高于截止值的部分去掉
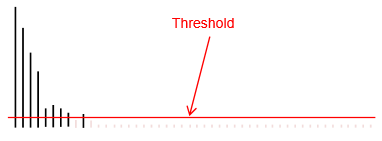
再做反变换,就得到了干净的信号。

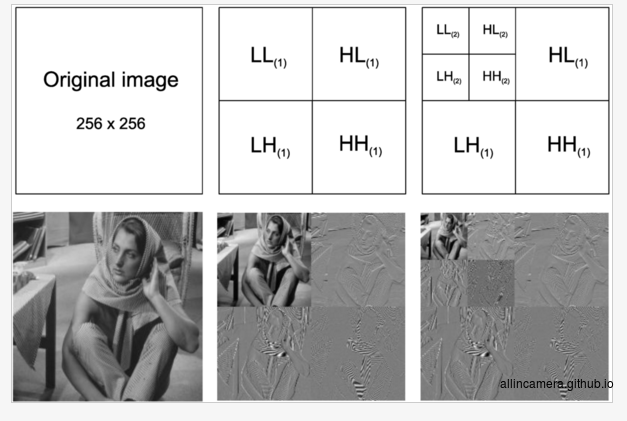
从频率上可以把噪声分为高中低频噪声,用这种变换域的方法就可以把不同频率的噪声分离,然后有效的去掉。像傅立叶变换,小波变换都是比较常见的变换域方法。
BM3D去噪
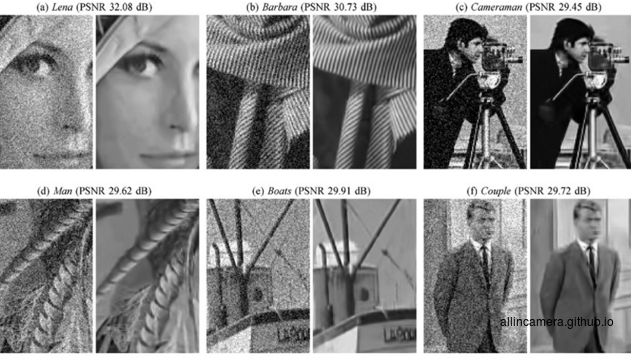
简单来说,BM3D融合了spatial denoise和tranform denoise,可以得到最高的峰值信噪比。它先吸取了NLM中的计算相似块的方法,然后又融合了小波变换域去噪的方法。这是芬兰Tampere工业大学在2007年发表的论文里提出的算法。(了解NOKIA的人就知道Tampere这个城市就是NOKIA最早起源的地方)。
具体算法如下:
第一步,搜索相似块,然后把相似的块grouping成一个个3D stack。(图像本身是2D,变成stack就成了3D)
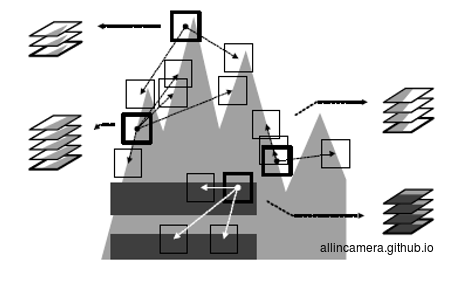
第二步,把这些3D stack进行变换域
第三步,3D 协同滤波—-听着很邪乎,细节需要自行wiki
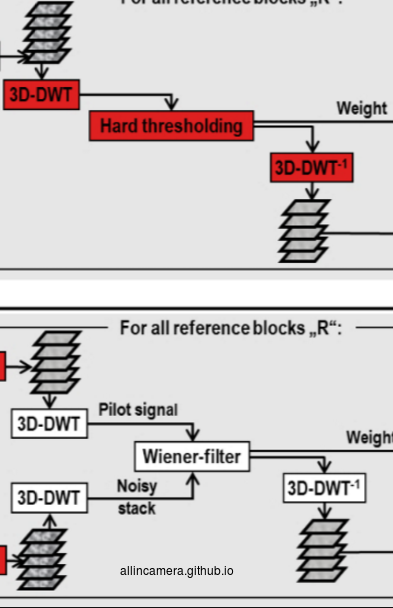
第四步,反变换以及blending
红色模块里提到的在变换域中thresholding的设定,有自适应计算的方法,但在工程中用的效果比较好的是噪声模型法,关于噪声模型,我们会在下一篇中进行介绍。
本文系微信公众号《大话成像》,知乎专栏《大话成像 all in camera》原创文章,转载请注明出处。